Abstraction Layers
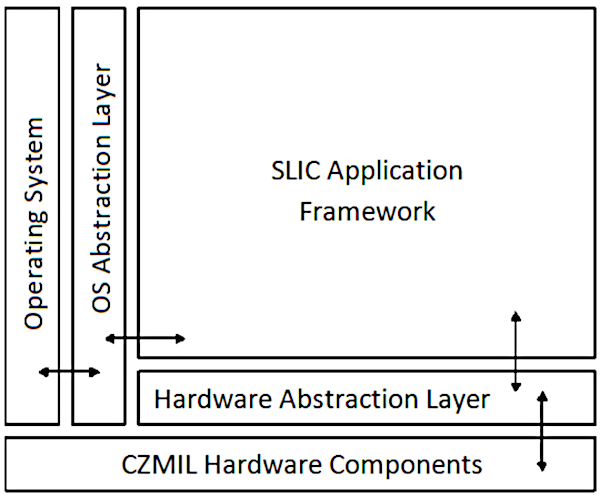
The core functionality of the SLIC application is insulated from all hardware by using abstraction layers. This protects the core functionality from any platform or hardware component changes. This image shows the SLIC control abstraction design; including the two abstraction layers that separate the SLIC framework from both the PC and the CZMIL sub-systems.
The OS abstraction layer acts as an adapter between the application framework and the underlying operating system. This provides OS independence for the application’s core framework. For example, if the software were to be moved from Linux to Windows then only the OS abstraction layer would have to be altered.
The hardware abstraction layer adheres to the same concept as the OS abstraction layer. All hardware specific functionality will be contained within this layer. This way swapping or updating hardware components will only affect this layer and not the core application framework.